The function that automatically switches between the Power Save mode and the High-Speed mode in accordance with the output current is the Green Operation (GO) function.
When the output current is low, the function switches to the power save mode, and when the output current is high, it switches to the high-speed mode and thus can achieve both a power save and high-speed response.
Most applications wait for the stopped state called sleep and for the operating state called active. Take the movement of a mouse, for example, where it is only moved for a moment and most of the time is in a sleep state.
This function is optimum for applications where the wait time is long and a high-speed response is required only when the application operates.
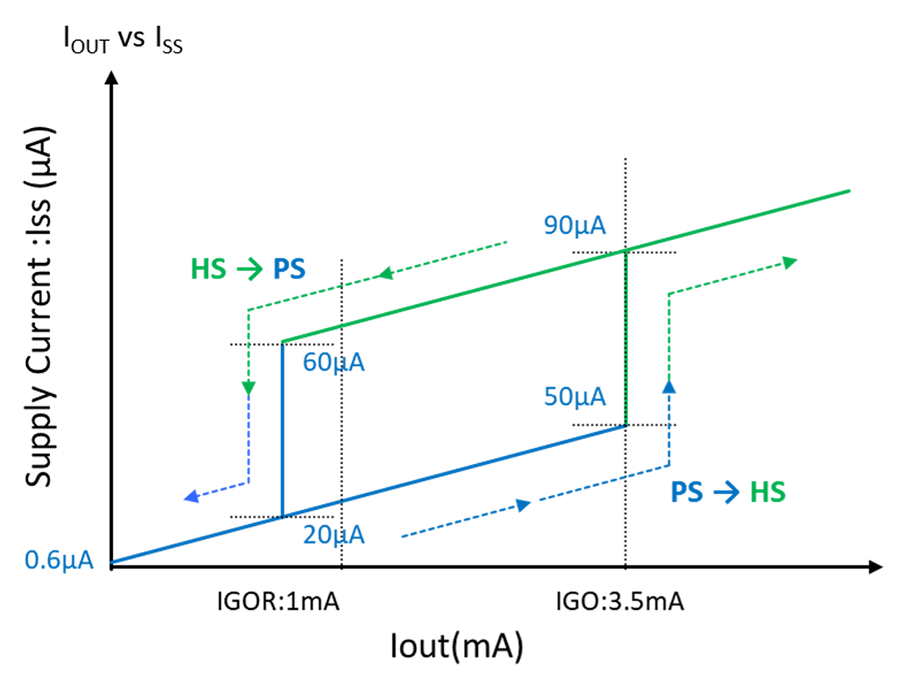
For the example in the above figure, for the Power Save mode during sleep, the quiescent current is held to 0.6μA to hold down the battery drain as much as possible. When the application enters the operating state and the output current exceeds 3.5mA, the quiescent current is increased to 90μA to enter the high-speed mode and enable a high-speed response.
A hysteresis is employed to switch the current value between the Power Save mode and the High-Speed mode and to ensure the Power Save mode and High-Speed mode do not repeat within a short period of time.
Let’s compare the difference in the load transient response characteristic between a product containing the GO function and a conventional power-saving regulator.
When the load current is 1mA, the low-quiescent current is the same 0.6μA for both.
To cause a transient response up to 50mA, the product containing the GO function enters the high-speed mode and the load transient voltage change amount is held to 1/10 that of the power-saving product.
Load transient response characteristic (VIN=5.0V, VOUT=3.3V, CIN=CL=1μF)
With a GO function
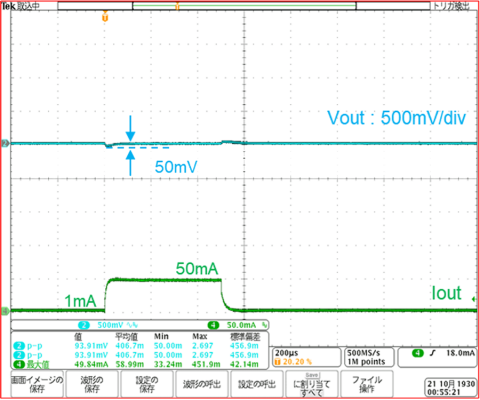
Quiescent current: 0.6μA
Power saving type
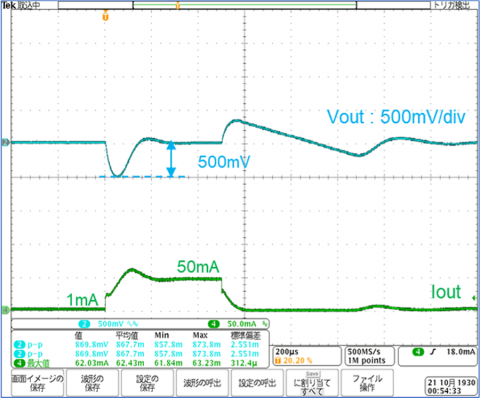
Quiescent current: 0.6μA